Il Principio di Minima Azione (che indicheremo in seguito con PMA) sebbene sia poco conosciuto dai più, può considerarsi il padre di tutti i principi. Esso fu introdotto per primo da Maupertuis nel 1744. Era già noto il principio di Fermat (1661 – 1665), che: un raggio di luce per andare da un punto a un altro, tra tutti i cammini possibili, percorrere il cammino che richiede il tempo più breve. Il percorso di un raggio di luce che attraversa due mezzi a velocità diverse può essere rappresentato con l’esempio del problema del bagnino. Un bagnino posto sulla battigia deve soccorrere un bagnante in mare. Sapendo che il bagnino si muove sulla spiaggia con velocità maggiore che nell’acqua, si vuole determinare qual’è il percorso con il minor tempo per raggiungere il bagnante.
Partendo dal percorso della luce Maupertuis ipotizzò che anche un corpo soggetto a forze segue il percorso più economico ossia di minima azione, definendo con azione la quantità S = m*v*s [massa*velocità*spazio] su tutto il percorso. Essa verrà espressa meglio da Eulero come: S = F*s*t [forza*spazio*tempo]. Il principio di minima azione può esprimersi quindi: S = ∫F*s*dt = minimo. A differenza della legge di Newton, che permette di calcolare la traiettoria punto per punto, il PMA permette di trovare la sola traiettoria reale tra le tante possibili. In effetti, tale principio, contiene la legge di Newton. Nel 1788 Lagrange utilizzò tale principio, per un sistema conservativo, mediante l’energia totale L del sistema. Successivamente, più in generale, Hamilton utilizzò l’energia totale H per un sistema qualunque e mostrò che le equazioni del moto si possono derivare dalla condizione di stazionarietà dell’azione (punti di minimo, massimo, flesso).
Fisica Newtoniana: Consideriamo un corpo P di massa m in moto, se vogliamo sapere la sua posizione nel tempo t dobbiamo conoscere: la sua posizione iniziale xio e velocità iniziale vio (con i= x,y,z), nonché come varia la forza in ogni istante: Fi(t). dalla 2° legge della dinamica: F(t) = m*a(t) si ricava a(t) = F(t)/m (1) Nota l’accelerazione a(t) si ricava la velocità dopo un istante dt : dv = a(t)*dt (2), la posizione del corpo: s(to+dt) = so + vo*dt + ½*dv*dt (3) e la velocità: v= vo+ dv. E’ possibile, in tal modo, definire in ogni istante t la dinamica del corpo. 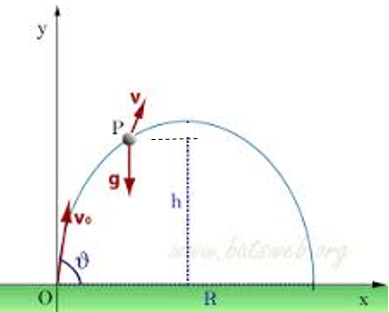 La posizione e la velocità (x, v) del moto sono dette proprietà locali del moto. Il prodotto cartesiano F = R³xR³, delle coppie di ordinate: posizione e velocità (x, v), viene chiamato spazio degli stati o delle fasi. La lunghezza della traiettoria, la variazione di energia o la variazione della quantità di moto su tutto il percorso, sono considerate, invece, proprietà globali scalari (scalari in quanto definibili con un numero).
La posizione e la velocità (x, v) del moto sono dette proprietà locali del moto. Il prodotto cartesiano F = R³xR³, delle coppie di ordinate: posizione e velocità (x, v), viene chiamato spazio degli stati o delle fasi. La lunghezza della traiettoria, la variazione di energia o la variazione della quantità di moto su tutto il percorso, sono considerate, invece, proprietà globali scalari (scalari in quanto definibili con un numero).
Fisica Lagrangiana. Utilizzando la proprietà globale energia del sistema la formulazione di Lagrange permette di definire la dinamica del moto. Calcoliamo allora tale grandezza su tutto il percorso. Ad esempio:
- se la forza F dipende dalla posizione la si può integrare per tutto il percorso -V = ∫F(x) *dx , tale grandezza viene chiamata energia potenziale;
- se la forza F dipende dal tempo la si può integrare per il percorso x espresso in funzione del tempo (x = v*t): T = ∫F(t)*v *dt e viene chiamata energia cinetica.
Troviamo quindi l’energia totale E del sistema somma dell’energia cinetica T = ½ m*v2 e dell’energia potenziale V. Pertanto E(x,t) = ½ m*v2 – V . Se si deriva tale energia rispetto al tempo si ha: dE/dt = ½ m*d(v2)/dt – δV/δx*δx/δt = mv*a – F*v → dE/dt = (m*a-F)*v (4)
e per la 2° legge di Newton (m*a – F = 0) → dE/dt = 0 Tale L’equazione esprime anche la conservazione dell’energia nel tempo.
Coordinate lagrangiane. Poichè nel formalismo di Lagrange interessa l’energia totale E del sistema, invece delle coordinate cartesiane (x,y,z), vengono utilizzate le coordinate lagrangiane qi, cioè le coordinate libere che tengono conto dei vincoli, mentre si tralasciano le coordinate con spostamento-lavoro nullo. Esempi: Se il punto materiale è vincolato a muoversi sulla superficie di una sfera di raggio R, come coordinate di Lagrange qi si considerano le coordinate polari (gli angoli) θ e φ che definiscono la latitudine e la longitudine del punto sulla superficie, mentre non viene considerata lo spostamento ortogonale alla superficie in quanto in tale direzione, lo spostamento è nullo così come il lavoro. Se il punto è vincolato, invece, lungo una curva, come coordinata lagrangiana q si considera la coordinata lunghezza della curva. Equazione di Lagrange Le coordinate q costituiscono quindi i gradi di libertà del sistema e possono avere le dimensioni di una lunghezza, di un angolo, … Di conseguenza le velocità lagrangiane q’ = dq/dt non hanno sempre le dimensioni di una velocità [m/s]. L’energia totale L funzione di dette variabili è detta lagrangiana: L=L(q,q’,t). Si trova che la derivata dE/dt = 0 (4) in forma lagrangiana è:
d/dt( δL/δq’) – δL/δq = 0 (4a)
La (4a) è composta da n equazioni ed è scritta in funzione delle n coordinate lagrangiane qi, (con i = 1,2, … n). Le coordinate qi definiscono lo spazio C detto spazio delle configurazioni. (sinonimo di posizioni permesse dai vincoli). Si osserva che con la δL/δq’ si trova la parte dell’energia totale dipendente dalle velocità lagrangiane q’ come l’energia cinetica, mentre d/dt( δL/δq’) indica la variazione di energia cinetica nel tempo. Con la δL/δq si trova la parte dell’energia totale dipendente dalle coordinate posizioni qi , come l’energia potenziale. La (4a) esprime cioè, in una forma diversa, la conservazione dell’energia totale (cinetica e potenziale) in un sistema. L’equazione di minima azione dS = F*s*dt = min. concettualmente può spiegarsi con l’esempio di un grave (con velocità nulla) posto su una superficie inclinata. Il grave fa uno spostamento elementare s nella direzione in cui il tempo di spostamento dt è minimo (cioè nella direzione di massima pendenza).
Esempio: Calcoliamo la lagrangiana (4a) per un corpo in moto verticale con velocità v soggetto a gravità g. Il sistema ha coordinata lagrangiana q = h e q’ = dh/dt = v per cui: energia cinetica T = 1/2mv2 ed energia potenziale V(h) = – mg*h. L’energia totale è:
L = T+V = 1/2mv2 – mg*h (5)
da essa troviamo che : dL/dh = 0 – mg mentre δL/δv = 2(1/2*m)v -0 = mv e d( δL/δv)/dt = ma per cui la Lagrangiana (4a): dL/dh – d(δL/δv)/dt = ma – mg = 0, ossia si ritrova la 2° legge del moto F = m*a. Si osserva che dalla grandezze scalare energia totale del sistema si ricavano le equazioni del moto vettoriali nelle coordinate lagrangiane qi. Consideriamo adesso l’energia totale del sistema L per tutto il tempo t del moto, cioè: S = ∫L(q,q’,t)*dt tale grandezza scalare è detta azione. Essa costituisce la somma dell’energia totale L per il tempo del moto per cui è una grandezza globale. Si dimostra che dalla condizione: δS = δ ∫L(q,q’,t)*dt = 0 (6) si ricava il sistema di equazioni lagrangiane: d/dt( δL/δq’) – δL/δq = 0 (4b).
Relatività Ristretta. Si fa rilevare che nella R.R. in sistemi di riferimento inerziali (in assenza di forze F = 0), lo spazio*tempo rimane costante: s’*t’ = s*t. Infatti mentre lo spazio si contrae con la velocità lungo la direzione del moto il tempo si dilata: s’ = s*(1 – v2/c2) e t’ = t/(1 – v2/c2). (Vedi Relatività Ristretta e Principio di Minima Azione)
Se consideriamo adesso il PMA nella forma espressa da Eulero: S = F*s*t [forza*spazio*tempo] e tenuto che F=0 in quanto sistemi di riferimento inerziali, l’azione S = F*s*t si riduce solo allo spazio*tempo s*t che, come visto sopra, risulta costante. Possiamo ipotizzare che anche la relatività ristretta sia un caso particolare del PMA, o che almeno abbia un legame particolare.
Relatività Generale. In breve tale teoria nasce nel supporre che:
- la massa gravitazionale e la massa inerziale siano la stessa cosa;
- la gravità può essere sostituita localmente da una accelerazione;
- la forza gravitazionale non si propaga istantaneamente ma alla velocità della luce.
Tenuto conto di quanto sopra: la R.G. sostituisce la forza gravitazionale F con la curvatura dello spazio-tempo. Tale curvatura si propaga alla velocità della luce. Se consideriamo adesso il PMA nella forma espressa da Eulero: S = F*s*t [forza*spazio*tempo] non considerando la forza (gravitazionale) F. L’azione S = F*s*t si riduce solo allo spazio*tempo s*t e il moto avviene lungo linee geodetiche, che hanno (per definizione) lunghezza spazio-tempo minima. Sembra quindi che anche la R.G. , con le sue linee geodetiche, sia un caso particolare del PMA.